Andalucía Profundiza 2016
PROYECTO:
"Robot para resolver el cubo de Rubik"
Robótica I.E.S. Jaroso
Empezamos nuestro reto...
SESIÓN 1: 02/03/2016
- Presentación del proyecto.
- Ventajas de la robótica en la enseñanza.
- Metodología y planificación del proyecto.
- Fases de un proyecto de investigación.
- Autorización de derechos de imagen.
- La Robótica Educativa.
- Robot de Lego Mindstorm.
- El cubo de Rubik.
- Métodos/Algoritmos de resolución del cubo de Rubik.
- Primer contacto práctico con la manipulación de un robots que gire una capa del cubo de Rubik.


RESUMEN DE NUESTRO PROYECTO


CUBO DE RUBIK


WEB INTERESANTES SOBRE EL CUBO DE RUBIK...
IDEAS PREVIAS DE ROBOT SIMILARES..


EMPEZAMOS A TRABAJAR CON EL ROBOT.......









Primer diseño para soportar el cubo




Primeras pruebas para girar una capa del cubo




Vídeo de las pruebas para girar una capa del cubo
SESIÓN 2: 19/03/2016
PROGRAMA
- Cubo de Rubik. Métodos de resolución.
- Robot para resolver el cubo. Características.
- Diseño de un soporte superior.
- Construcción del brazo para girar el cubo.
- Pruebas del diseño construido.
El robot se compone básicamente de tres mecanismos: un primer mecanismo o bandeja donde se deposita el cubo y tiene la capacidad de girar en ambos sentidos. Un segundo mecanismo que soporta el sensor de color y tiene la función de escanear los colores de cada una de los nueve recuadros que componen cada cara; y un tercer mecanismo que se encarga de voltear el cubo.
CONSTRUCCIÓN DEL BRAZO PARA GIRAR EL CUBO





CREATIVIDAD E INGENIO....



LAS CORRECCIONES EN EL DISEÑO SON CONSTANTES....

NUESTRO ROBOT EMPIEZA A TOMAR FORMA....


PRUEBAS Y CAMBIOS EN EL DISEÑO....






SEGUIMOS LA CONSTRUCCIÓN DEL ROBOT CON EL MONTAJE DEL SENSOR DE COLOR




PRUEBAS FINALES DE LA SESIÓN


VÍDEO DE LA SESIÓN 2
BUEN TRABAJO CHICOS Y CHICAS!!!
SESIÓN 3: 09/04/2016
PROGRAMA
- Finalización de la base y sujección del robot.
- Pruebas del brazo para girar el cubo.
- Posibilidades de construcción. Modelos de robot anteriores.
- Análisis y pruebas de distintos mecanismos.
-----------------------------------------------------------------------------------------
Robot con un kit lego mindstorm NXT
Para inspirar y motivar nuestra creatividad.......
Un modelo de robot:
TILTED TWISTER El segundo modelo de robot para armar el cubo Rubik corresponde al robot denominado "Tilted Twister" de Han Andersson.
El vídeo presentado por el autor de este modelo, en youtube, se encuentra en el siguiente link:http://tiltedtwister.com/tiltedtwister2.html

Montaje de nuestro modelo robot Tilted:


Pruebas de nuestro propio diseño de robot:


Mucha dificultad en el mecanismo del brazo de giro del cubo en las pruebas realizadas en los prototipos:

Vídeo de esta sesión 3:
SESIÓN 4: 23/04/2016
PROGRAMA
- Búsqueda de información sobre el brazo o garra robótico.
- Análisis del posible diseño a utilizar en el robot.
- Elección del brazo robot a utilizar en el diseño del robot.
- Construcción del brazo o garra del robot para el giro del cubo.
- Investigación sobre aplicaciones para ver una cámara del robot en ordenadores o dispositivos móviles.
Robot con un kit lego mindstorm NXT
Para inspirar y motivar nuestra creatividad.......
Algunas ideas de modelos de robot
MINDCUBER
El primer robot es el modelo denominado "MindCuber" de David Gilday, que se presenta en la pagina oficial de lego como Bonus Model #9.
El vídeo original de este robot se puede observar en el siguiente link.

Diseño final del brazo de giro del cubo:





Ajustes y lubricación de los cubos de Rubik:




Pruebas de los mecanismos del robot:


Vídeo de la cuarta sesión:
SESIÓN 5 30/04/2016
PROGRAMA
- Finalización de construcción y pruebas del brazo robótico.
- Verificación y posibles modificaciones del diseño del robot.
- Investigación sobre algoritmo para resolver el cubo de Rubik.
Fotos de la quinta sesión:
Montaje del brazo de giro del cubo del robot:


Modificaciones en el diseño y montajes:





Montaje del brazo en el robot diseñado:


Vídeo de la quinta sesión del programa:
Sesión 6: Sábado 14 - 05 - 2016
Programación:
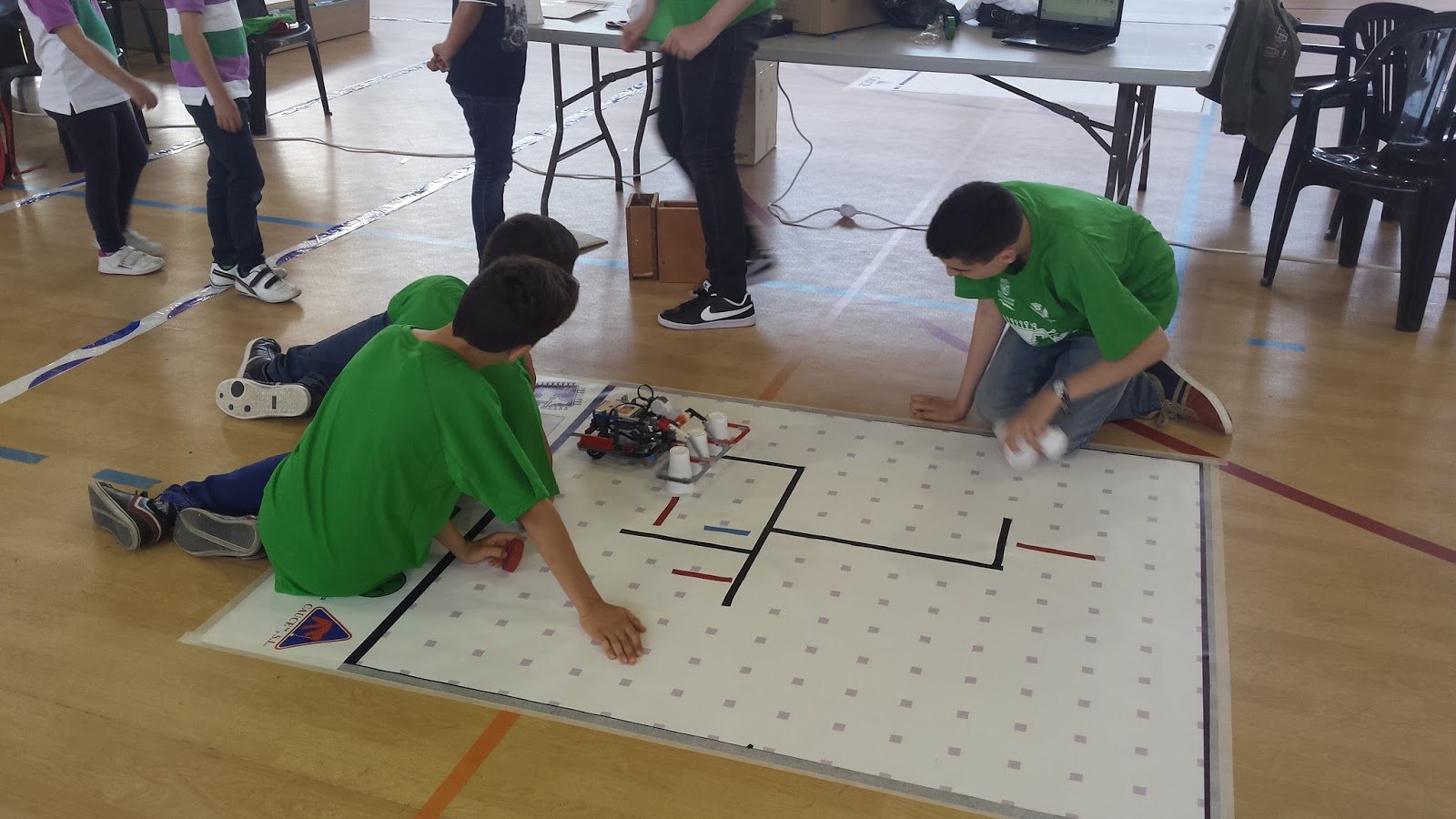
- Visita al Tecnoencuentro de robótica de Pulpí.
- Participación de un grupo del alumnado en la competición del tecnoencuentro.
- Exposiciones y competiciones del mundo de la robótica.
-Premios recibidos: 2º Premio Exhibición (Multirobot) y Premio Especial de competición a la solución más innovadora (Jaroso B).
Fotos de la sexta sesión:


































































PROYECTO PRESENTADO:
"Robótica en el I.E.S. Jaroso: Explorando Marte"
PREMIO CONSEGUIDO:
SEGUNDO PREMIO EXHIBICIÓN
Nuestro trabajo también el blog de Multirobot:
Empezamos nuestro reto...
- Presentación del proyecto.
- Ventajas de la robótica en la enseñanza.
- Metodología y planificación del proyecto.
- Fases de un proyecto de investigación.
- Autorización de derechos de imagen.
- La Robótica Educativa.
- Exploración espacial.
- Planeta Marte. Superficie.
- Primer contacto práctico con la manipulación de distintos robots.

PRESENTACIÓN DEL PROYECTO DE INVESTIGACIÓN
RESUMEN DE NUESTRO PROYECTO

PLANETA MARTE

WEB INTERESANTES SOBRE MARTE...
IDEAS PREVIAS DE MAQUETAS SIMILARES..


Proyecto similar desarrollado por un I.E.S. de Madrid
EMPEZAMOS A TRABAJAR CON LA MAQUETA.......
PROGRAMA
- Marte.
- Superficie de Marte, características.
- Elaboración de una maqueta.
- Base de cartones.
- Papel absorbente y cola blanca.
- Contrucción de la maqueta.
- Construcción de rocas, un volcán y desniveles para la superficie.
CONSTRUCCIÓN DE LA MAQUETA DE MARTE

CORTAMOS LOS CARTONES....




CREANDO UN VOLCÁN....

CREANDO ROCAS....



DISEÑANDO LAS IRREGULARIDADES DEL TERRENO....


EMPEZAMOS LA ÚLTIMA ETAPA DE CONSTRUCCIÓN DE LA MAQUETA





SÓLO NO FALTA PINTAR LA MAQUETA....

UNOS MOMENTOS DE DIVERSIÓN CREANDO LAS ROCAS PEQUEÑAS....

BUEN TRABAJO CHICOS Y CHICAS
PROGRAMA
- Correciones en la construcción de la maqueta de la superficie marciana.
- Pintado de la maqueta.
- Pintado de las rocas.
- Impresión y colocación de las imágenes del horizonte marciano.
- Tarea: Investigar como construir un robot con tracción 4x4 utilizando el kit de Lego Mindstorm NXT.
Acabados de la superficie marciana:
Primer acabado con spray de pintura......




Pintamos las rocas marcianas.....


Acabado final con pintura......


Imágenes del horizonte marciano...

PROGRAMA
-Acabado final en rocas de la superficie marciana.
- Locomoción de un robot explorador.
- Tracción 4x4.
- Posibilidades de construcción.
- Análisis y pruebas de distintos mecanismos.
Locomoción: 4x4 Vehículos del kit lego mindstorm
Algunas ideas de modelos tracción 4x4, 6x6


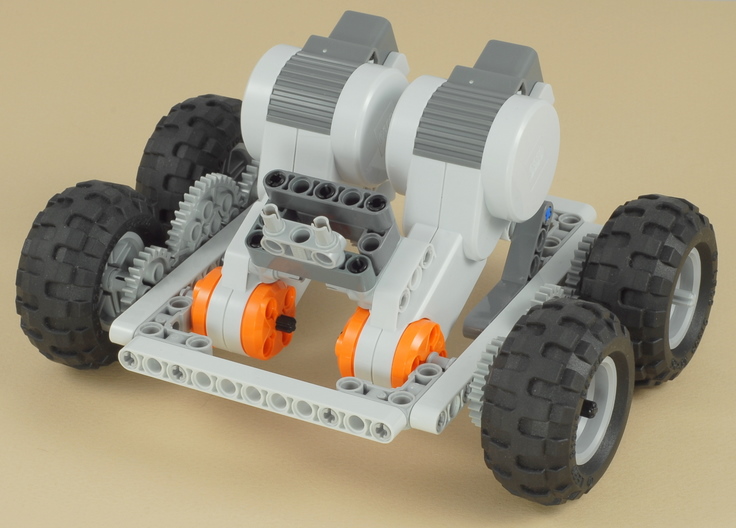


Diseño del modelo elegido:
Primer grupo

Segundo grupo



Pruebas iniciales sobre la maqueta:


Pruebas con algunas mejoras realizadas en el prototipo:


Vídeo de las pruebas iniciales:
PROGRAMA
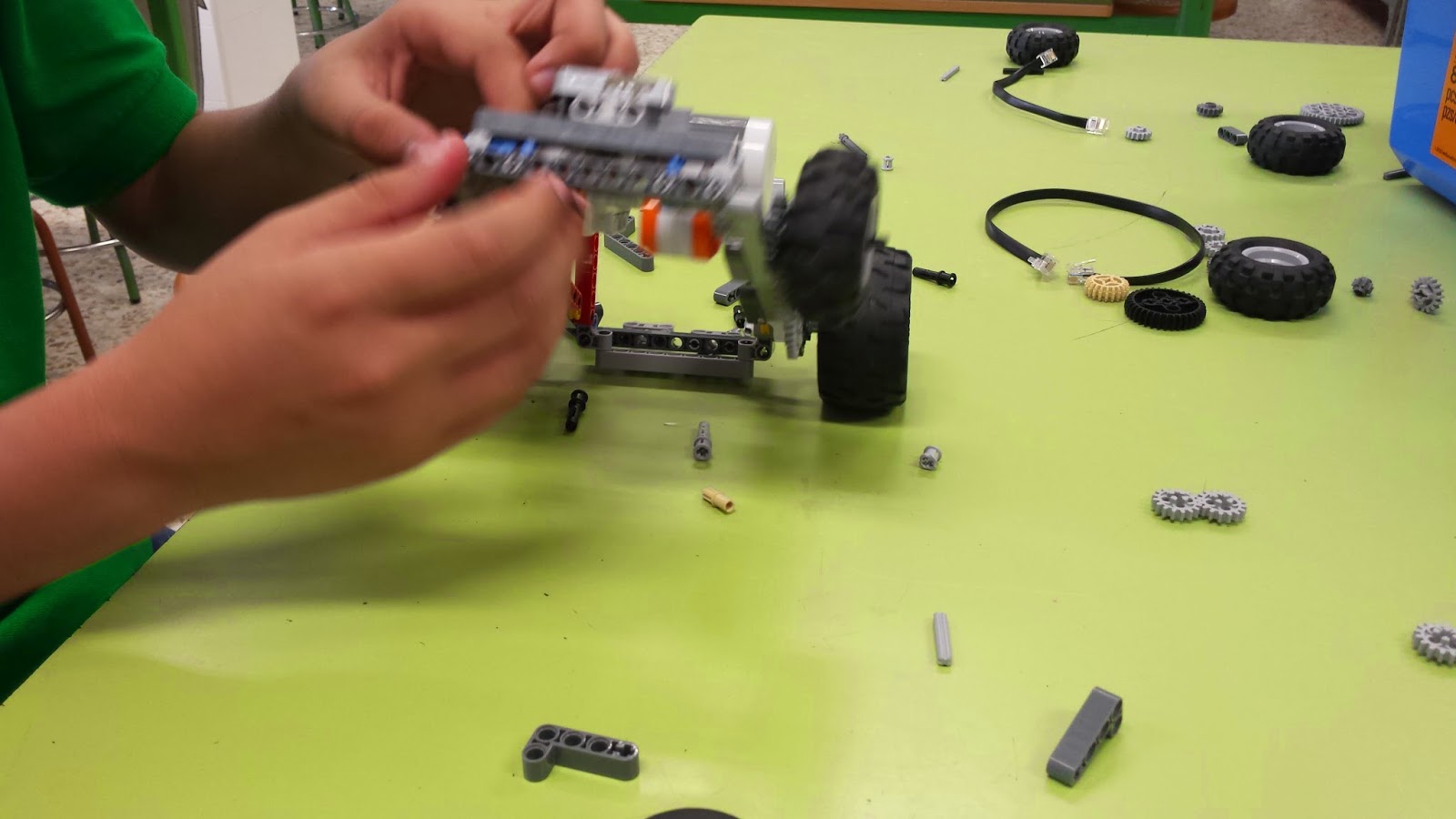
- Construcción del robot explorador.
- Presentación e inventario de los componentes del robot.
- Búsqueda de información sobre el brazo o garra robótico.
- Análisis del posible diseño a utilizar en el robot.
- Elección del diseño del robot.
- Construcción del brazo o garra robótico.
- Investigación sobre aplicaciones para ver una cámara del robot en ordenadores o dispositivos móviles.
Diseño final del robot explorador:











Pruebas de los robots exploradores:





Primeros pasos en el diseño del brazo robótico:



Vídeos de las pruebas de los robots:
PROGRAMA
- Construcción y pruebas del brazo robótico.
- Pruebas de ordenes sencillas en el robot a distancia.
- Verificación y posibles modificaciones del diseño del robot.
- Aplicaciones para ver una cámara del robot en ordenadores o dispositivos móviles.
- Pruebas de la cámara del robot y del programa.
- Investigación sobre aplicaciones para controlar el robot para ordenadores y dispositivos móviles.
Fotos de la sesión:
Configuración de la cámara y montaje en el robot:




Pruebas de la cámara de un robot explorador:







Maqueta de la superficie marciana finalizada:



Vídeo de la sexta sesión del programa:
Programación:
- Pruebas del robot y su cámara.
- Montaje y posibles modificaciones del brazo del robot.
- Control remoto del robot desde un ordenador.
- Instalación y aprendizaje del software para el control robot.
- Pruebas de control remoto del robot desde un ordenador.
Fotos de la sesión:
Retoques finales en la garra o brazo robótico:




Últimas modificaciones:

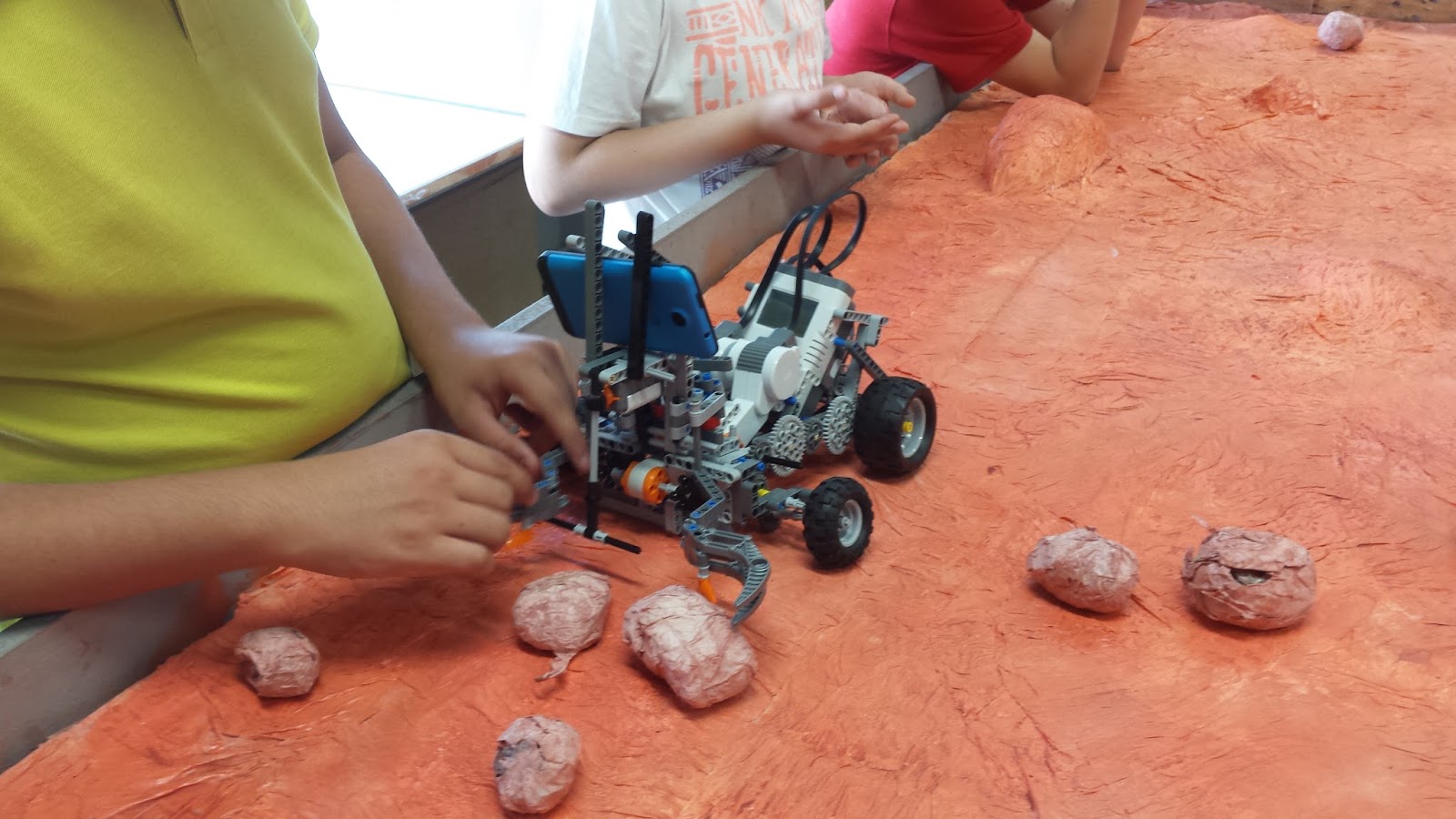
Primeras pruebas con brazo robótico y cámara:

Recogida de una roca marciana con el robot explorador:


Programación:
- Pruebas del robot explorador y posibles mejoras.
- Pruebas del software de control remoto.
- Pruebas de la cámara y vídeo del robot.
- Modificaciones de última hora.
- Encuesta de valoración del programa alumnado y familia.
- Exposición a padres/madres del trabajo realizado.
Últimos pasos de montaje de la garra del robot:

Últimas pruebas de control a distancia del robot:




Últimas pruebas del robot explorador:

Últimas modificaciones del robot:















Control a distancia de los robots exploradores:


Visita de las familias y muestra del trabajo realizado:



Nuestro grupo casi al completo con sus diplomas:




ENHORABUENA CHICOS Y CHICAS!!!
Vídeo de las pruebas finales:
Vídeo resumen del proyecto realizado:
ENHORABUENA CHICOS, CHICAS Y FAMILIARES!!!
A SEGUIR APRENDIENDO DÍA A DÍA!!!!
Gracias por todo!!!!
Sesión 7: Sábado 28 - 05 - 2016
Programación:
- Programación del robot mindstorm de Lego para resolver cubo de Rubik.
- Programación Sensor.
- Programación movimiento del brazo.
- Programación giro de la base.
- II Encuentro provincial jovenes investigadores.
Fotos de la séptima sesión:


Creatividad para montajes libres:

Modificaciones en nuestro modelo:



Montaje de otro modelo de robot:

Vídeo de la sesión:
Sesión 8: Sábado 11 - 06 - 2016
Programación:
- Pruebas finales del robot mindstorm de Lego para resolver cubo de Rubik.
- Montajes y experiencias de neumática con el kit de robótica de Lego.
Fotos de la octava sesión:
EXPLORANDO NUEVOS APRENDIZAJES CON LA NEUMÁTICA!!!




ENHORABUENA CHICOS Y CHICAS POR VUESTRO ESFUERZO!!!
Vídeo resumen del proyecto realizado:
ENHORABUENA CHICOS, CHICAS Y FAMILIARES!!!
A SEGUIR APRENDIENDO DÍA A DÍA!!!!



{kind=link}
Jesús: ¡felicidades por el proyecto!
ResponderEliminarAl grupo de alumnas y alumnos participantes: ¡mucho ánimo!
Deseo que aprovechéis esta magnífica oportunidad de aprendizaje que os brinda el programa para que esta curiosidad que ahora manifestáis os conduzca a apasionaros por el mundo de la investigación.
Saludos,
Antonia Sánchez
http://cuborubik2x2x2andaluciaprofundiza.blogspot.com.es/
ResponderEliminar¡Mucha suerte!